导航
- LSTM原理
- GRU原理
- Seq2Seq架构
- 编码信息损失
- 参考资料
LSTM原理
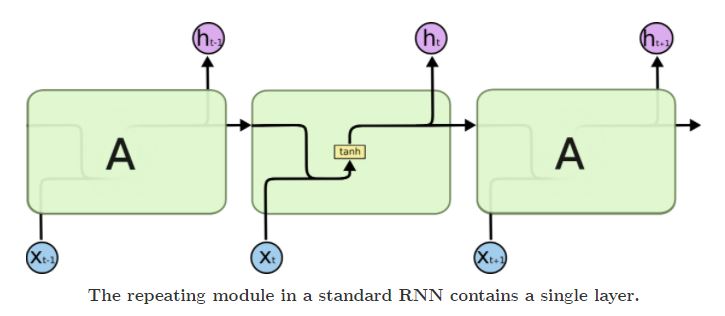
一般RNN中仅有一个隐藏状态单元hth_tht,且不同时刻的隐藏状态单元的参数是共享的,这种结构导致了RNN存在长期依赖问题,只能对短期输入敏感.
 LSTM在普通RNN上加入了元胞状态单元ctc_tct,在不同的时刻有着可变的连接权重,ctc_tct通过对hth_tht的调节形成长短期记忆.
LSTM在普通RNN上加入了元胞状态单元ctc_tct,在不同的时刻有着可变的连接权重,ctc_tct通过对hth_tht的调节形成长短期记忆.
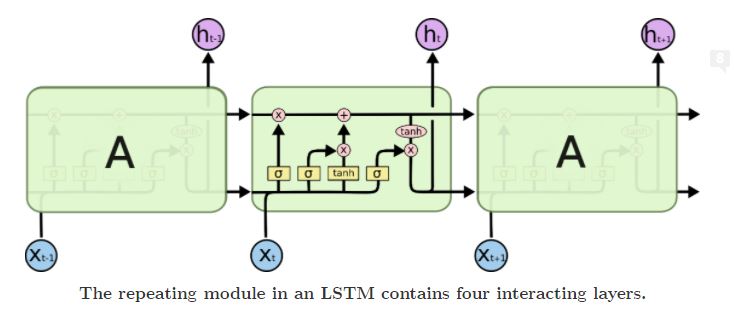
LSTM引入了门控单元,对于每个时刻ttt,LSTM有输入门iti_tit,遗忘门ftf_tft和输出门oto_tot等3个门控单元,每个门控单元的输入包括当前时刻的序列信息xtx_txt和上一时刻的隐藏状态单元ht−1h_{t-1}ht−1,计算方程为
{it=σ(Wixt+Uiht−1+bi)ft=σ(Wfxt+Ufht−1+bf)ot=σ(W0xt+Uoht−1+b0)\left\{ \begin{aligned} &i_t=\sigma(W_ix_t+U_ih_{t-1}+b_i)\\ &f_t=\sigma(W_fx_t+U_fh_{t-1}+b_f)\\ &o_t=\sigma(W_0x_t+U_oh_{t-1}+b_0) \end{aligned} \right. ⎩⎪⎨⎪⎧it=σ(Wixt+Uiht−1+bi)ft=σ(Wfxt+Ufht−1+bf)ot=σ(W0xt+Uoht−1+b0)
3个门控单元的计算方式均为全连接层,区别仅在于权重矩阵和偏置,激活函数σ(⋅)\sigma(\cdot)σ(⋅)一般使用sigmoid函数,取值范围为[0,1][0, 1][0,1],将门控单元与信号数据做逐元素相乘,可以控制信号通过门控后要保留的信息量,可以设置当门控单元状态为0时,信号被全部丢弃;当状态为1时,信号被全部保留;而当状态在[0,1][0, 1][0,1]时,部分信号被保留.
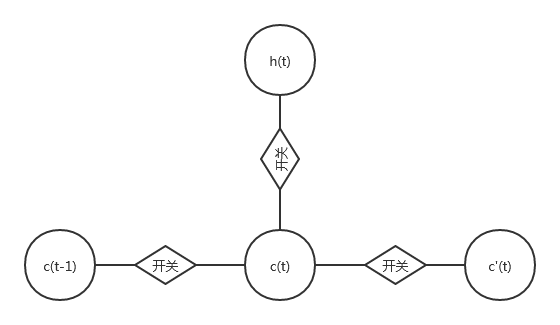
从示意图中可以看出,元胞状态单元从上一时刻的ct−1c_{t-1}ct−1到当前时刻的ctc_tct转移是由输入门和遗忘门共同控制的,输入门决定了当前时刻输入信息c~(t)\tilde{c}(t)c~(t)有多少被吸收,遗忘门决定了上一时刻元胞状态单元ct−1c_{t-1}ct−1有多少未被遗忘,最终的元胞状态单元ctc_tct由两个门控处理后的信号综合产生.
c~t=tanh(Wcxt+Ucht−1+bc)ct=ft⊙ct−1+it⊙c~t\begin{aligned} &\tilde{c}_t=\tanh(W_cx_t+U_ch_{t-1}+b_c)\\ &c_t=f_t\odot c_{t-1}+i_t\odot\tilde{c}_t \end{aligned} c~t=tanh(Wcxt+Ucht−1+bc)ct=ft⊙ct−1+it⊙c~t
其中,⊙\odot⊙表示逐元素点乘操作,LSTM的隐藏状态单元hth_tht则由输出门和ctc_tct共同决定
ht=ot⊙tanh(ct)h_t=o_t\odot\tanh(c_t) ht=ot⊙tanh(ct)
可以看出,在LSTM中,不仅隐藏单元ht−1h_{t-1}ht−1和hth_tht之间存在连接,ct−1c_{t-1}ct−1和ctc_tct之间也存在线性自循环的关系,这种线性自循环是一种滑动处理信息的机制,当门控单元开启时,记住过去的信息;当门控单元关闭时,丢弃过去的信息,这种线性自循环的机制使得LSTM可以解决RNN中长期依赖的问题.
GRU原理
考虑设计一种仅有两个门控单元的RNN,其中一个门控单元控制短期记忆,另一个门控单元控制长期记忆,Kyunghyun Cho等提出的GRU模型使用更少的参数实现了LSTM的功能.

LSTM有两个状态单元hth_tht和ctc_tct,GRU使用了一个状态单元hth_tht,两个门控单元,重置门rtr_trt和更新门ztz_tzt,每个门控单元的输入包括当前时刻的序列信息xtx_txt和上一时刻的隐藏状态单元ht−1h_{t-1}ht−1,计算方程为
rt=σ(Wrxt+Urht−1)zt=σ(Wzxt+Uzht−1)\begin{aligned} &r_t=\sigma(W_rx_t+U_rh_{t-1})\\ &z_t=\sigma(W_zx_t+U_zh_{t-1}) \end{aligned} rt=σ(Wrxt+Urht−1)zt=σ(Wzxt+Uzht−1)
在GRU中,重置门决定之前的隐藏状态单元是否被忽略,更新门则控制当前隐藏状态单元是否被新的隐藏状态更新.
h~t=tanh(Whxt+Uh(rt⊙ht−1))ht=(1−zt)ht−1⏟上一时刻保留信息+zth~t⏟当前时刻记忆下的信息\begin{aligned} &\tilde{h}_t=\tanh(W_hx_t+U_h(r_t\odot h_{t-1}))\\ &h_t=\underbrace{(1-z_t)h_{t-1}}_{\text{上一时刻保留信息}}+\underbrace{z_t\tilde{h}_t}_{\text{当前时刻记忆下的信息}} \end{aligned} h~t=tanh(Whxt+Uh(rt⊙ht−1))ht=上一时刻保留信息(1−zt)ht−1+当前时刻记忆下的信息zth~t
可以发现,遗忘和记忆的权重设定为互补关系.
Seq2Seq架构
在Seq2Seq中,由于输入序列与输出序列不是等长的,所以对整个序列的处理分为理解(编码)和翻译(解码)两个步骤,并且编码器和解码器可以在两个不同的RNN上并行实现.
Seq2Seq采用一个固定尺寸的状态向量CCC作为编码器与解码器之间的桥梁,编码器可以是一个简单的RNN,输入序列为X=(x1,x2,…,xT)X=(x_1, x_2, \dots, x_T)X=(x1,x2,…,xT),其隐藏状态hth_tht的计算公式为
ht=f(ht−1,xt)h_t=f(h_{t-1}, x_t) ht=f(ht−1,xt)
其中f(⋅)f(\cdot)f(⋅)是非线性激活函数,将最后时刻的隐藏状态hTh_ThT作为状态向量输入到解码器.
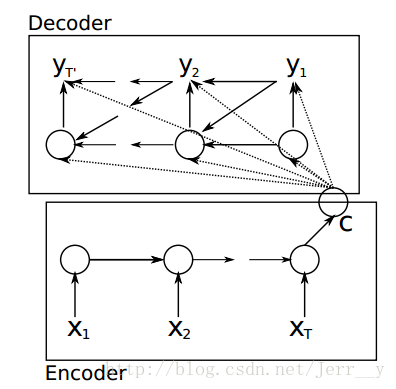
解码器根据状态向量CCC生成长度可变的解码序列Y=(y1,y2,…,yT′)Y=(y_1, y_2, \dots, y_{T'})Y=(y1,y2,…,yT′),解码器同样可以使用一个简单的RNN实现,其隐藏状态hth_tht计算公式为
ht=f(ht−1,yt−1,C)h_t=f(h_{t-1}, y_{t-1},C) ht=f(ht−1,yt−1,C)
其中,yt−1y_{t-1}yt−1是上一时刻的输出,f(⋅)f(\cdot)f(⋅)是非线性激活函数,解码器的输出由如下公式确定
P(yt∣yt−1,yt−2,…,yt,C)=g(ht,yt−1,C)P(y_t\mid y_{t-1}, y_{t-2}, \dots, y_t, C)=g(h_t, y_{t-1}, C) P(yt∣yt−1,yt−2,…,yt,C)=g(ht,yt−1,C)
其中g(⋅)g(\cdot)g(⋅)会产生一个概率分布,解码器工作流程如图所示
或者使用一种更加简单的方式实现解码器,仅在初始时刻需要状态向量CCC,其他时刻仅接受隐藏状态和上一时刻的输出信息
P(yt)=g(ht,yt−1)P(y_t)=g(h_t, y_{t-1}) P(yt)=g(ht,yt−1)
在训练阶段,需要让模型输出的解码序列尽可能正确,可以通过MLE方法配合贪心算法实现
maxθ1N∑n=1Nlogpθ(Yn∣Xn)\max_\theta\frac{1}{N}\sum_{n=1}^N\log p_\theta(Y_n\mid X_n) θmaxN1n=1∑Nlogpθ(Yn∣Xn)
解码器每次根据当前状态和已解码序列,选择出最佳解码结果,直到算法收到终止信号.
编码信息损失
由于Seq2Seq中只用固定大小的状态向量连接编码模块和解码模块,这就要求编码器将整个输入序列的信息压缩到状态向量中,这个过程存在编码损失,一般的解决方案有序列翻转法.
Bahdanau(2014)提出了注意力机制模型,将状态向量CCC设置为动态,即
P(yt)=g(ct,yt,…,yt−1)P(y_t)=g(c_t, y_t, \dots, y_{t-1}) P(yt)=g(ct,yt,…,yt−1)
其中,ctc_tct是专门针对ttt时刻的状态向量.
参考资料
Understanding LSTM Networks
百面深度学习 中国工信出版集团 葫芦娃
LSTM和GRU讲解
Seq2Seq学习笔记
本文链接:https://my.lmcjl.com/post/6282.html
4 评论