做互联网的免不了被DDOS流量攻击,这就造就了,不少做得不错的网站,因为运营成本本来就不少了,还雪上加霜的要增加人力和物力来防御。今天大概说下,被DDOS攻击怎么办? 继续阅读
Search Results for: os
查询到最新的12条
ROS.yaml文件用法介绍
本文将从多个方面详细阐述ROS中的yaml文件,并给出相应的代码示例。 一、ROS.yaml文件是什么? ROS.yaml文件是ROS中用于配置参数的文件格式。它有助于参数的配置管理,可以通过配置文件的方式来快速获取、修改、存储和使用参数。 二、ROS.yaml文件的基本结构 ROS.yaml文件的基本结构包括键值对和注释。其中,键值对用于记录参数的名称和值,注释用于说明和解释键值对的含义。 下面是一个简单的ROS.yaml文件示例: # ROS.yaml 继续阅读
远程管理 Mac OSX 设备
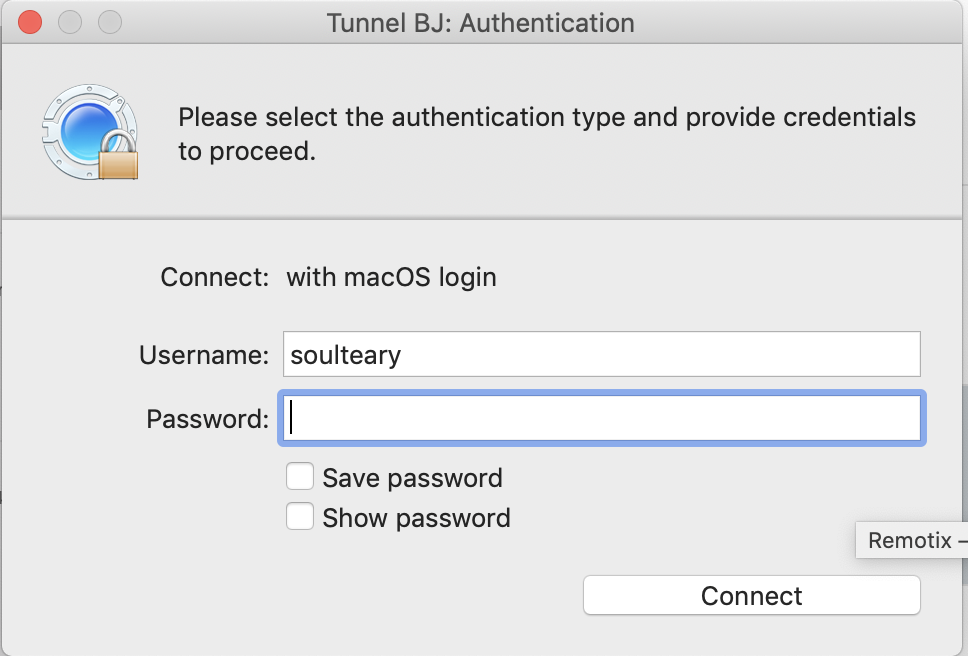
本文使用「署名 4.0 国际 (CC BY 4.0)」许可协议,欢迎转载、或重新修改使用,但需要注明来源。 署名 4.0 国际 (CC BY 4.0) 本文作者: 苏洋 创建时间: 2019年03月11日 统计字数: 4300字 阅读时间: 9分钟阅读 本文链接: https://soulteary.com/2019/03/11/mac-osx-remote-management.html 远程管理 Mac OSX 设备 开发设备一般开放 SSH 端口和访 继续阅读
CentOS上搭建PHP服务器环境的步骤与方法
本文实例讲述了CentOS上搭建PHP服务器环境的步骤与方法。分享给大家供大家参考,具体如下: 安装apache: ? 1 yum install httpd httpd-devel 继续阅读
docker+docker-compose+nginx前后端分离项目部署
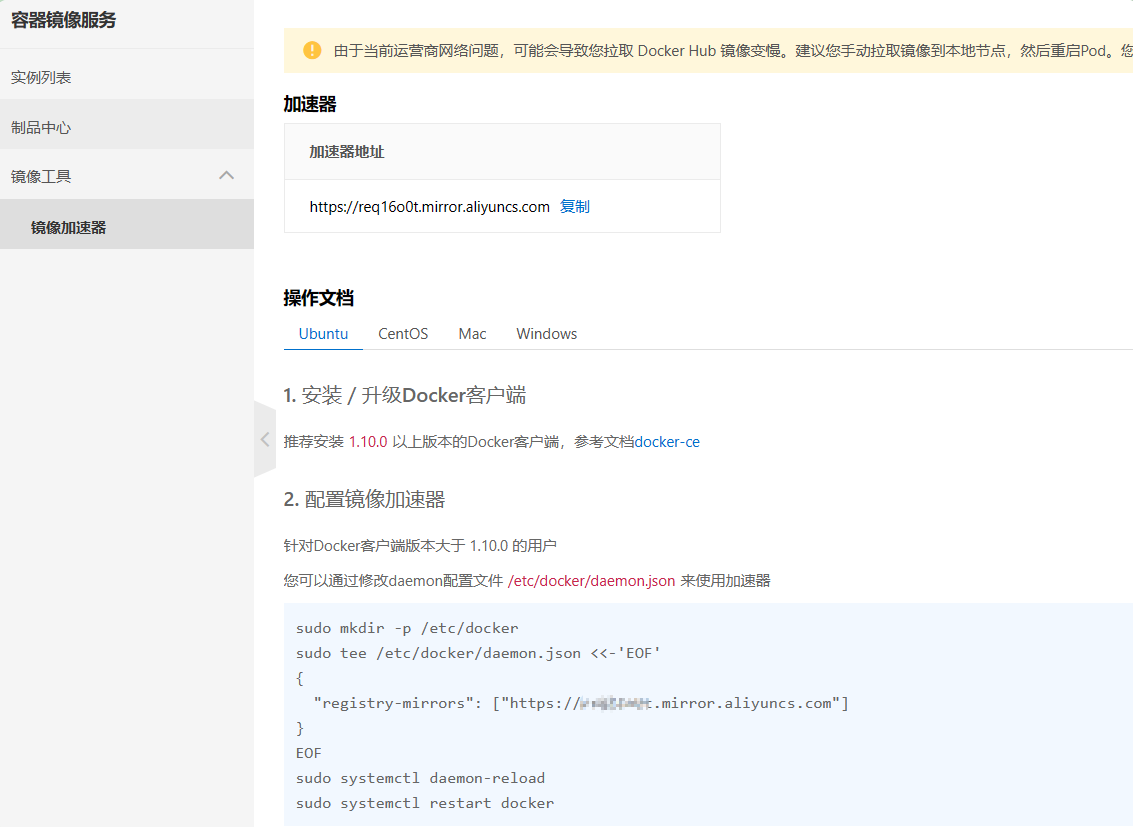
1.安装docker 1.1 基于centos的安装 安装yum-utils sudo yum install -y yum-utils 从国内服务器上下载docker sudo yum-config-manager \--add-repo \http://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo 安装docker sudo yum install -y docker-ce docker-ce-cli co 继续阅读
桥接模式、NAT模式、仅主机(Host Only)模式的区别

前情提要:新建虚拟机时的3种网络类型:①桥接模式、②NAT模式、③仅主机模式(Host Only)。下面来谈谈区别。 网络类型 1.桥接模式:虚拟机直接连接路由器,与物理机是对等地位 2.NAT模式:虚拟机借助物理机进行路由器联网 3.仅主机模式(Host Only):不能联网,只能Ping通虚拟机 区别: ①桥接模式相当于把虚拟机变成一台完全独立的计算机,会 继续阅读
【ROS2指南-6】理解ROS2参数

目标:了解如何在 ROS 2 中获取、设置、保存和重新加载参数。 教程级别:初学者 时间: 5分钟 内容 背景 先决条件 任务 1 设置 2 ros2参数列表 3 ros2参数获取 4 ros2 参数集 5 ros2 参数转储 6 加载参数文件 概括 下一步 背景 参数是节点的配置值。您可以将参数视为节点设置。节点可以将参数存储为整数、浮点数、布尔值、字符串和列表。在 ROS 2 中,每个节点都维护自己 继续阅读
CentOS6.5系统简单安装与配置Nginx服务器的方法
本文实例讲述了CentOS6.5系统简单安装与配置Nginx服务器的方法。分享给大家供大家参考,具体如下: 依赖包安装 在安装nginx前,需要确保系统安装了g++、gcc、openssl-devel、pcre-devel和zlib-devel软件。安装必须软件: ? 1 2 继续阅读
【Linux】CentOS7 设定本机当前地区时间为虚拟机时间的简单操作

目录 情景系统环境操作 情景 新安装的虚拟机时间和当前本地系统时间不一致,现在想要将虚拟机和本机地区的时间调节为一致。 系统环境 CentOS Linux 7 系统界面大致如此。 操作 点击虚拟机界面左上角的 Applications 选项, 选择System-Tools-- Settings Details – Date& Time 进入界面后,单机右上角的Unlock,解锁原本的时间设置&# 继续阅读
如何在Windows/Linux/MacOS下安装Python
如果你对Python安装一无所知,本文将从多个方面对Python在Windows/Linux/MacOS下的安装做出详细阐述,为初学者提供帮助。 一、Windows下Python的安装 Python在Windows下的安装有多种方式,以下是两种较为简单的方法。 1. 安装程序安装 从官网下载最新版Python安装程序,运行安装步骤即可完成Python的安装。 下载地址:https://www.python.org/downloads/windows/ 2. 继续阅读
Amazon SPAPI By Postman 操作

I. 介绍 在论坛和群里仍然还有很多小伙伴对poatman操作有很多不熟悉的,而每次开case的时候,官网支持人员要求提供postman的Request Info and Response Info,或者自己调试的时候想要快速调用接口出结果,使用http工具无疑是很大的帮助,今天我用中文详解一遍如何使用postman去请求SPAPI接口。 SPAPI的概述 官方文档:Selling Partner AP 继续阅读
WebRTC 系列(二、本地 demo,H5、Android、iOS)

WebRTC 系列(一、简介) 一、整体流程 有了上一篇 WebRTC 简介的基础,我们知道了 WebRTC 的工作流程,接下来就是需要用代码去实现这个流程了。对于不同端,实现起来的难易程度可能略微不同(实践中我感觉 iOS 端是资料最少的),但是整体流程是一样的。 问:要把大象装冰箱,总共分几步?答:三步。 继续阅读