1.图的存储
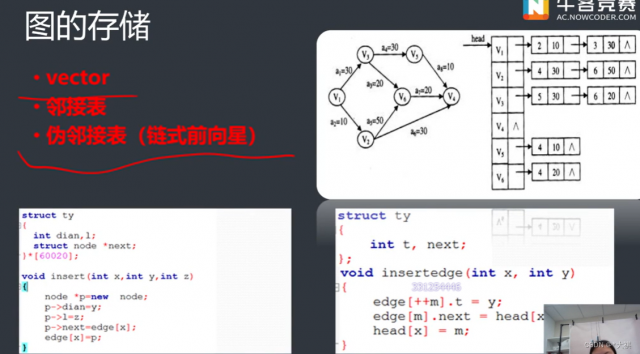
图的BFS遍历

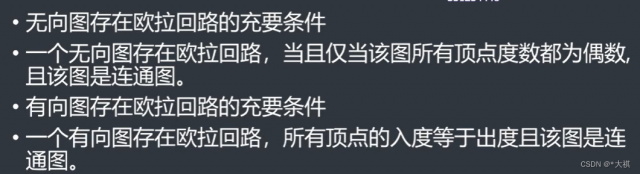
2.欧拉图
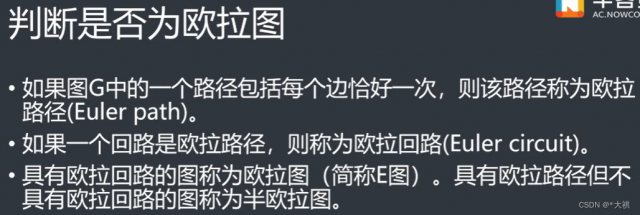
(即能不重复得走完所有边且起点和终点相同的为欧拉图,只能不重复走完所有边但不能回到起点的是半欧拉图)
3.拓扑排序
1)概念引入
一个工程常被分为多个小的子工程,这些子工程被称为活动(Activity),在有向图中若以顶点表示活动,有向边表示活动之间的先后关系,这样的·图简称为AOV网。在AOV网中为了更好地完成工程,必须满足活动之间先后关系,需要将各活动排一个先后次序即为拓扑排序。
(其实这个在我们生活中很常见啦,比如学校要排一个课表,规定必须要先上完高数再上线性代数,要先上完C语言再上数据结构......)
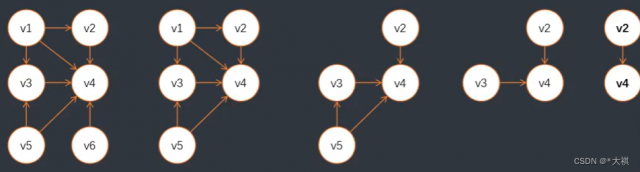
2)解法
只要每次去找入度为0的点(符合执行条件),取出它作为答案并将其删除,同时删除它到其它顶点的边,再重复此过程,直到顶点全部删完或是没有办法删除结点了(存在环,无解)
可以看出拓扑排序是有多解的
3)代码
#include<iostream>
#include<queue>
using namespace std;
const int M=1e6+6;
int n,m,head[M],ct,ind[M],ans[M];
queue<int> q;
struct ED{int t,next;
}e[M];
void addedge(int u,int v){e[++ct].t=v;e[ct].next=head[u];head[u]=ct;
}
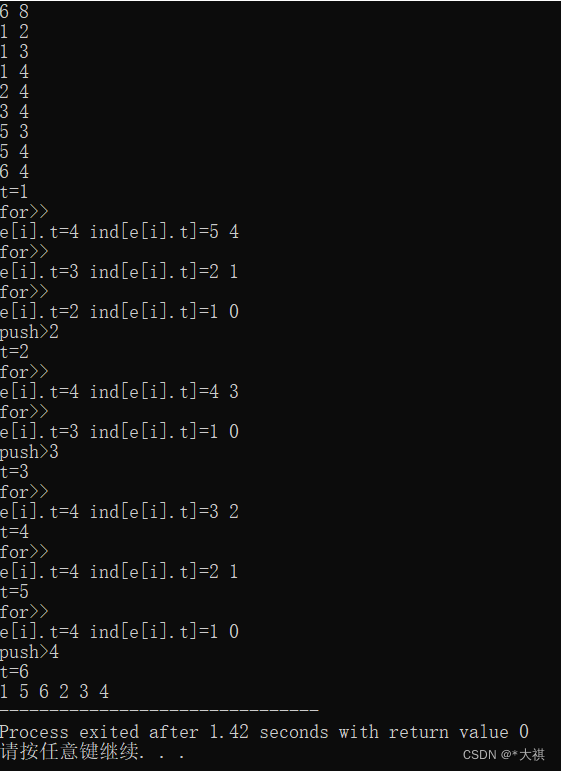
void tuopu(){int t=0;for(int i=1;i<=n;i++){if(!ind[i])q.push(i);}while(!q.empty()){int x=q.front();ans[t++]=x;//cout <<"t="<<t<<'\n';q.pop();for(int i=head[x];i!=-1;i=e[i].next){//cout <<"for>>\n";//cout <<"e[i].t="<<e[i].t<<' '<<"ind[e[i].t]="<<ind[e[i].t]<<' ';ind[e[i].t]--;//cout <<ind[e[i].t]<<'\n';if(!ind[e[i].t]){q.push(e[i].t);//cout <<"push>"<<e[i].t<<'\n';}}}if(t!=n)cout <<-1;elsefor(int i=0;i<n;i++)cout <<ans[i]<<' ';
}
int main(){ios::sync_with_stdio(false),cin.tie(0),cout.tie(0);cin>>n>>m;for(int i=1;i<=n;i++)head[i]=-1;int x,y;for(int i=0;i<m;i++){cin >>x>>y;addedge(x,y);ind[y]++;}tuopu(); return 0;
}
/*
6 8
1 2
1 3
1 4
2 4
3 4
5 3
5 4
6 4
*/
//因为每个点每条边都只访问了一次所以复杂度是O(n+m) 为了便于理解其过程,把中间变量打印了一些
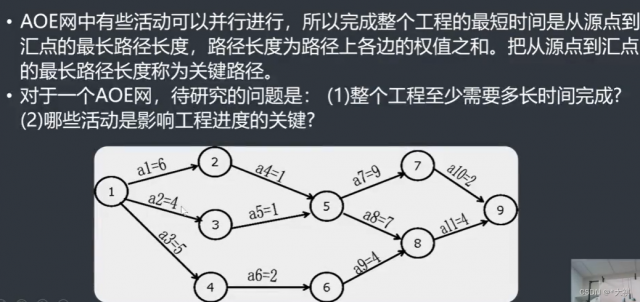
AOE网 关键路径

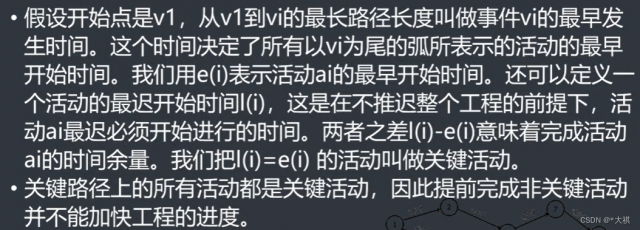
做法:从左往右按照拓扑的方法求出每个结点的最早开始时间,再从右往左,逆推出每个结点开始的最晚时间,如果最早时间==最晚时间,就是关键的路径上的点。
本文链接:https://my.lmcjl.com/post/13869.html
展开阅读全文
4 评论