Autoware
用于城市自主驾驶的集成开源软件,由第四层维护。支持以下功能:
- 3D本地化
- 3D映射
- 路径规划
- 路径跟随
- 加速/制动/转向控制
- 数据记录
- 汽车/行人/物体检测
- 交通信号检测
- 交通灯识别
- 车道检测
- 对象跟踪
- 传感器校准
- 传感器融合
- 面向云的地图
- 连接自动化
- 智能手机导航
- 软件仿真
- 虚拟现实
Autoware受BSD许可证保护。请自行负责使用。为了安全使用,我们为不拥有真正自主车辆的人提供基于ROSBAG的仿真方法。如果您使用Autoware与真正的自主车辆,请在现场测试之前制定安全措施和风险评估。
执照
- 新的BSD许可证
- 参见许可证
规格推荐
要求
- ROS靛蓝(Ubuntu 14.04)或ROS玉(Ubuntu 15.04)
- OpenCV 2.4.10或更高版本注意:截至2016年8月,Autoware不支持OpenCV 3或更高版本。请使用OpenCV 2
- Qt 5.2.1或更高
- CUDA(可选)
- FlyCapture2(可选)
- 犰狳
如果在ROS Hydro或Ubuntu 13.04,13.10上使用Autoware,请在2015 / OCT / 21之前使用结帐修订。
安装Ubuntu 14.04靛蓝的依赖
% sudo apt-get install ros-indigo-desktop-full ros-indigo-nmea-msgs ros-indigo-nmea-navsat-driver ros-indigo-sound-play ros-indigo-jsk-visualization ros-indigo-grid-map
% sudo apt-get install ros-indigo-controller-manager ros-indigo-ros-control ros-indigo-ros-controllers ros-indigo-gazebo-ros-control ros-indigo-sicktoolbox ros-indigo-sicktoolbox-wrapper ros-indigo-joystick-drivers ros-indigo-novatel-span-driver
% sudo apt-get install libnlopt-dev freeglut3-dev qtbase5-dev libqt5opengl5-dev libssh2-1-dev libarmadillo-dev libpcap-dev gksu libgl1-mesa-dev
注意:请勿安装ros-indigo-velodyne-pointcloud软件包。如果您已经安装,请卸载它。
安装Ubuntu 15.04玉器的依赖项
% sudo apt-get install ros-jade-desktop-full ros-jade-nmea-msgs ros-jade-nmea-navsat-driver ros-jade-sound-play
% sudo apt-get install ros-jade-controller-manager ros-jade-ros-control ros-jade-ros-controllers ros-jade-gazebo-ros-control ros-jade-sicktoolbox ros-jade-sicktoolbox-wrapper ros-jade-joystick-drivers ros-jade-novatel-span-driver
% sudo apt-get install libnlopt-dev freeglut3-dev qt5-default libqt5opengl5-dev libssh2-1-dev libarmadillo-dev libpcap-dev gksu libgl1-mesa-dev
注意:在Ubuntu15.04 Jade中没有提供jsk_visualization和grid_map。请从以下存储库下载并自行构建。https://github.com/jsk-ros-pkg/jsk_visualization https://github.com/ethz-asl/grid_map
如何构建
$ cd $HOME
$ git clone https://github.com/CPFL/Autoware.git
$ cd ~/Autoware/ros/src
$ catkin_init_workspace
$ cd ../
$ ./catkin_make_release
###基于Caffe的对象检测器基于CV的检测器RCNN和SSD节点不会自动构建。
要构建这些节点,请遵循相应节点的README SSD RCNN
如何开始
$ cd $HOME/Autoware/ros
$ ./run
对于开发人员
小心更改下面的文件ros/src/sensing/drivers/lidar/packages/velodyne。有子树。原始存储库在这里。如果从这个存储库更改这些文件,您必须使用Git子树推送。(如果您不明白,请不要更改并推送代码 git subtree)。
GitFlow,git分支模型,在Autoware仓库中引入。
- 添加新功能时,您可以从中分支功能分支
develop。
您可以使用以下命令。$ git checkout -b feature/[your_branch_name] develop - 当您在
master分支中发现错误时,可以从您的修补程序分支中分离出来master。
您可以使用以下命令。$ git checkout -b hotfix/[your_branch_name] master
更多细节在这里
文件
请参阅Autoware / docs。截至2015年8月,我们仅提供日本文件。英文文本将会加入。
主要包装
本土化
- ndt_localizer
- icp_localizer
发现
- lidar_tracker
- cv_tracker
- road_wizard
使命(全球)规划
- lane_planner
- way_planner
- freespace_planner
运动(本地)规划
- astar_planner
- lattice_planner
- dp_planner
车辆控制
- waypoint_follower
- waypoint_maker
引文研究论文
- S.加藤,Takeuchi,Y. Ishiguro,Y.Ninomiya,K.Takeda和T. Hamada。“开放式自动车辆方法”,IEEE Micro,Vol。35,No. 6,pp。60-69,2015。
演示视频
公路示范
说明视频
快速开始
加载地图数据
GNSS定位
没有GNSS的本地化
制图
用SSD进行检测
用DPM检测
用欧氏距离聚类检测
交通灯识别

规划与ROSBAG

用wf_simulator进行规划
混合状态A *

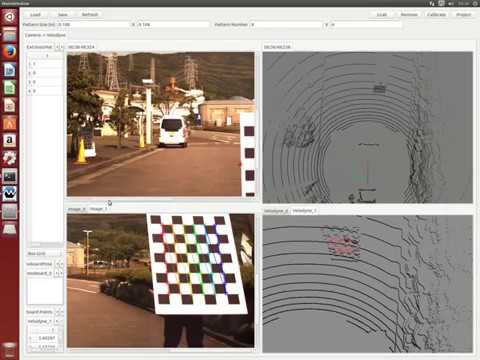
校准工具包
样品数据
森山在名古屋的3D地图
森山驾驶的ROSBAG数据
用于生成森山的演示启动文件的脚本
ROSBAG数据用于校准
IROS 2016数据
名古屋驾驶的ROSBAG数据
联系
Autoware Developers(autoware@googlegroups.com)
要订阅Autoware Developers ML,
- 如果您有Google帐户,请访问https://groups.google.com/d/forum/autoware,然后点击应用于加入群组按钮。
- 如果您没有Google帐户,请发送电子邮件至autoware+subscribe@googlegroups.com。
autoware入门:快速使用
建立目录“.autoware”来保存demo数据
~$ mkdir .autoware
下载demo数据:
A script for generating a demo launch file:
http://db3.ertl.jp/autoware/sample_data/my_launch.sh
Map/calibration/path data (Moriyama area):
http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz
rosbag data:
http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz
解压
~$ cd .autoware
~/.autoware$ tar xfz sample_moriyama_data.tar.gz
~/.autoware$ tar xfz sample_moriyama_150324.tar.gz生成launch文件
~/.autoware$ sh my_launch.sh运行命令后会生成以下的launch文件:
my_launch/
my_map.launch # Load PointClouds and vector maps
my_sensing.launch # Load device drivers
my_localization.launch # Localozation
my_detection.launch # Object detection
my_mission_planning.launch # Path planning
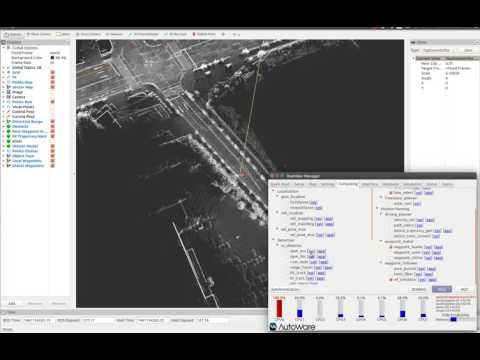
my_motion_planning.launch # Path following运行runtime manager
$ cd autoware/ros
$ ./run会出现两个分离的终端窗口。一个是[roscore],另一个是[runtime_manager]
Runtime Manager启动前要输入管理员密码,输入密码后就可以启动了。
运行rosbag
在Runtime Manager的simulation界面中,导入”sample_moriyama_150324.bag”,然后点击pause按钮。
启动RViz
点击RViz按钮启动Rviz可视化工具。启动后选择[file]-[open config],在[choose a file to open]对话框中,选择以下文件,然后点击[open]。
“~/Autoware/ros/src/.config/rviz/default.rviz”
加载点云图和向量图
在[quick start]界面,加载my_map.launch,并且点击[map]按钮。
“~/.autoware/data/my_launch/my_map.launch”
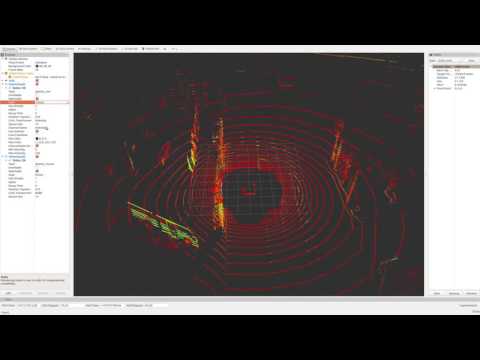
定位
在[quick start]界面,加载my_localization.launch,并且点击[localization]按钮。
“~/.autoware/my_launch/my_localization.launch”
在[simulation]界面,点击[pause]按钮来重新运行rosbag。
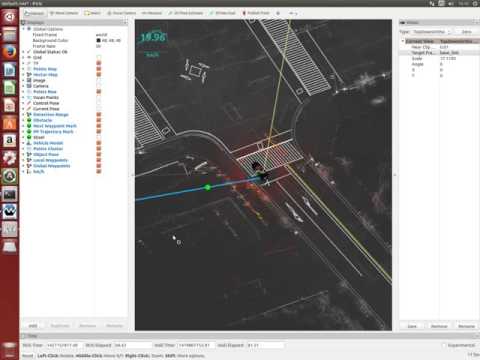
在Rviz中的 [Display]窗口, [Global Options]-[Fixed Frame] , 设置为 “world”.
在 [Current View]-[Target Frame]的 [View] 窗口, 选择“base_link” 并且设置[Type]为“TopDownOrtho”。点击 [Zero] 按钮. (可以初始化追踪汽车的位置)。
当simulation界面的进度条到达23%左右(110/479sec),演示应该趋向于稳定了。
任务规划
在[quick start]界面,加载my_mission_planning.launch,并且点击[mission planning]按钮。
“~/.autoware/my_launch/my_mission_planning.launch”
运动规划
在[quick start]界面,加载my_motion_planning.launch,并且点击[motion planning]按钮。
“~/.autoware/my_launch/my_motion_planning.launch”
本文链接:https://my.lmcjl.com/post/981.html
4 评论