傅科摆和傅科陀螺
1851年,法国物理学家傅科 (Foucault, J.) 在巴黎先贤祠大厅的穹顶上悬挂了一条67m长的绳索,下端连接一个28kg的摆锤(图1、图2),这个著名的傅科摆是人类为证明地球自转的首次实验。虽然哥白尼 (Copernivus, N.) 的日心学说早在16世纪就已提出,但人们仍无法通过自己的感官直接意识到地球的运动。

图1 傅科 (J.Foucault, 1819-1868)
图2 傅科摆实验
1602年,伽利略 (Galilei, G.) 已对单摆的规律有了深入的认识。单摆的摆动是平面运动,摆动平面在惯性空间内维持方位不变。如地球有自转运动,摆动平面相对地球就会发生偏转。地球绕极轴每昼夜自转一周,自转角速度Ωe 每小时逆时针转动 150°。巴黎的纬度ϕ 为北纬48.52°,地球绕巴黎地垂线的角速度为Ωesinϕ,即大约每小时11.24°。将摆长l=67m,重力加速度g=9.8m/s² 代入单摆的周期公式,T=2π(l/g)1/2=16.4s。每摆动一次,摆动平面应相对地球顺时针转过约3角分。实验验证了傅科的预言引起极大轰动。
完成傅科摆实验的第二年,傅科于1852年在巴黎科学院进行了另一次实验。他展示了一台由细线悬挂着装有转子的圆环构成的新仪器,转子的旋转轴可自由改变方向(图3)。让转子的旋转轴沿子午线朝北保持水平,无力矩作用时,旋转轴应保持惯性空间中的指向不变。如地球逆时针转动,地球上的观测者应能看到旋转轴相对地球的顺时针偏转,从而再次证明地球自转(图4)。但实验并未获得预期结果,两个重要原因导致失败。其一,转子的转速太低;其二,悬线的扭矩严重阻碍了转子的运动。实验虽未成功却具有重要意义,因为这台不够完善的仪器是历史上第一台具有科学意义的陀螺仪 (gyroscope)。
图3 傅科的陀螺仪
02
能指北的傅科陀螺仪
陀螺仪是由外环、内环(或内含转子的壳体)和转子组成的系统。以陀螺的质心O 为原点建立 (O-xyz) 坐标系。x 轴为外环转轴,y 轴为内环转轴,z 轴为转子极轴,是转子的旋转轴。外环的转角为α,内环绕外环的转角为β(图4)。以i、j、k 表示各坐标轴的基矢量。若转子的极惯性矩为C,绕z 轴快速旋转的角速度为 ω0,则动量矩L=Cω0k。分析陀螺转子的进动时,缓慢转动的内外环的动量矩可略去不计。以O 为原点建立与地球固结的地理坐标系 (O-XEN),其中,X 轴沿地垂线向上,E 轴沿纬线向东,N 轴沿子午线向北(图5)。将陀螺仪的外环轴x 沿垂直轴X 安放在地球上。先假设内环相对外环固定的简化情形,令β=0。因转子的旋转轴z 轴仅剩一个自由度,称为单自由度傅科陀螺仪。
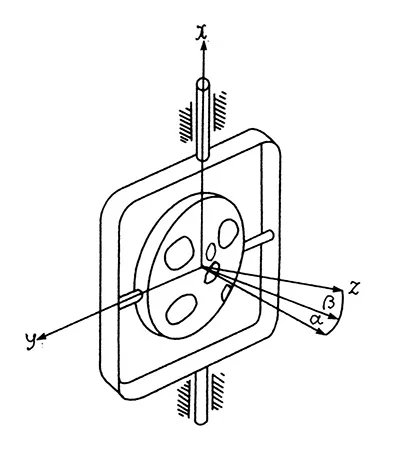
图4 内外环支承的陀螺仪
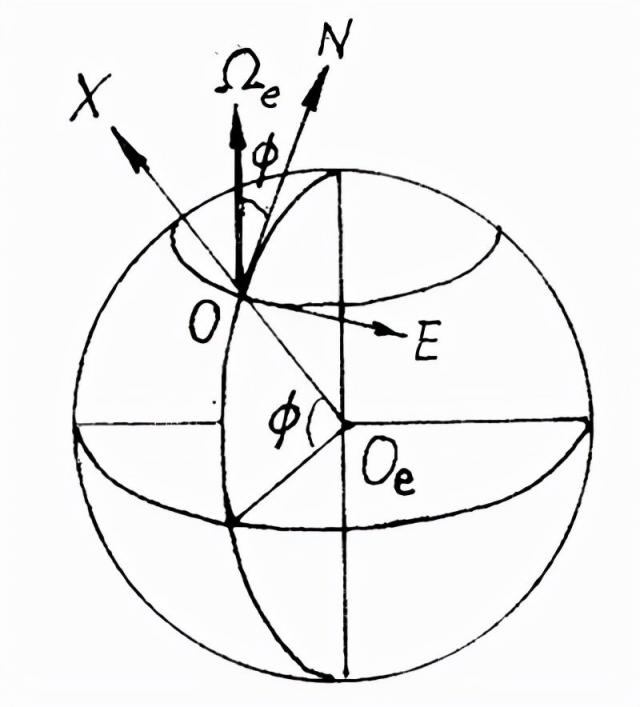
图5 地理坐标系
旋转物体的旋转轴在力矩作用下改变方向的运动称为进动,刚体进动产生的惯性力矩称为陀螺力矩。地球是绕极轴Z0 以角速度Ωe 自转的转动坐标系,设安装处的纬度为ϕ,以X0、E0、N2表示 (O-XEN) 各坐标轴的基矢量,令Ω1=Ωecosϕ, Ω2=Ωesinϕ,则Ωe=Ω2X0+Ω1N0。设初始时 (O-xyz) 与 (O-XEN) 重合,转子的极轴z 指北。随后框架绕x 轴逆时针转过α 角,使极轴偏离子午线。因框架绕X 轴可自由转动不受约束,Ωe 沿X 轴的分量Ω2X0 不可能传递给转子。只有沿N 轴的分量Ω1N0 可通过轴承的约束力作用于转子使其进动,产生沿x 轴的陀螺力矩 Mc=L×Ω1N0。仅保留α 的一阶小量,将N0=αj+k 代入后,导出

此力矩与框架的偏转方向相反,促使框架与极轴绕x 轴回归到子午线位置。回归过程中转子的动量矩L 沿y 轴变化所需要的外力矩,由轴承的约束提供。以上分析表明,单自由度傅科陀螺仪具有指北的能力。
但这种单自由度陀螺仪很难用于船舶或其它移动载体。原因是地球自转过于缓慢,所产生的陀螺力矩过于微弱,无法克服轴承摩擦的阻滞。此外,陀螺的框架轴必须严格保持垂直,稍有倾斜即产生严重误差。虽不能实际应用,这个简单的陀螺装置却开创了利用地球自转创造指北仪器的奋斗历程。
03
如何创造能实际使用的陀螺罗经
我们的祖先很早就在海洋上活动,在茫茫大海中航行需要正确的方位指示。利用地球磁场的指南针是我国四大发明之一,传入西方后成为远洋船队必备的磁罗经。15世纪郑和下西洋的庞大舰队,16世纪伽马、哥伦布的舰队,都离不开磁罗经的导航,但磁罗盘只能用于木制船舶。19世纪初,欧洲出现了铁船,钢铁船体对磁力线的干扰使磁罗经失效。于是,探索新的航海罗经就成为航海大国的迫切任务。傅科陀螺仪的出现,为创造新型罗经提供了希望。
单自由度陀螺不成功,令内环自由转动,改为二自由度陀螺。将外环垂直固定在地球北半球上的P 点,先令内环水平,转子极轴沿子午线指北。短暂时刻后,地球因自转绕南北极轴转过微小角度,使P 点沿纬线自西向东转到P 点处。由于陀螺的定轴性,极轴为保持惯性空间中的指向不变,向东偏离子午线的新位置而出现α 偏角(图6)。单自由度陀螺仪能利用地球自转产生的陀螺力矩使极轴回归子午线位置,但因恢复力矩过于微弱不可能实际利用。因此,关键问题是要寻找更强大的动力使极轴迅速恢复原位。
仔细观察可以发现,在向东偏离子午线的同时,极轴还微微抬起,出现β 偏角而不再保持水平。极轴偏离水平面的这一现象非常重要,它提示了利用重力恢复原位的可能性。如果在安装转子的内环下方增加配重,使内环和转子组合体的重心向下偏离支承中心,形成绕y 轴转动的复摆。当内环抬头时,重力产生沿纬线向西的力矩,使极轴带动外环绕垂直轴向西进动,回到与子午线一致的原位置。于是思路逐渐清晰:利用重力摆产生的力矩代替微弱的地球自转引起的陀螺力矩,可使陀螺仪的转子进动跟踪子午线。
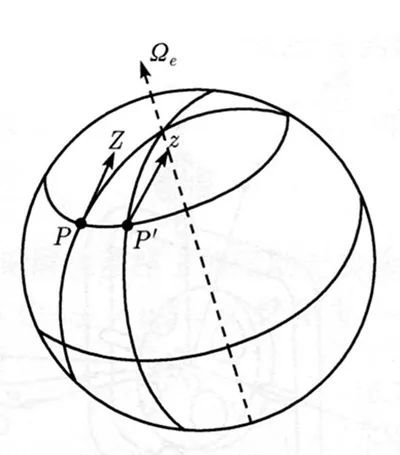
图6 地球自转引起转子极轴的偏转
令绕x 轴的重力矩mglβ 与转子进动产生的陀螺力矩L(dα/dt ) 互相平衡。导出

其中,k=mgl/L。此时转子因内环偏角β 的变化产生绕y 轴的陀螺力矩L(dβ/dt ),与地球自转Ωe引起的陀螺力矩LΩ1α 互相平衡,导出

以上两个方程确定了罗经的进动规律。分析此线性方程组,导出特征λ=±i(kΩ1)1/2,表明罗经指北的平衡状态稳定。受扰后的运动是围绕平衡状态的周期运动,周期为T=2π/(kΩ1)1/2。因Ω1<<1,罗经的周期极长,可长达一个多小时。由于α 与β 的变化速度过于悬殊,运动过程中极轴的端点轨迹是极扁的椭圆。若无阻尼因素存在,开机后转子极轴将沿扁椭圆缓慢地进动。要使陀螺罗经能实际使用,起动后极轴必须快速静止在子午线上。因此,有效的阻尼措施必不可少。有两种可采用的阻尼方案:增加沿x 轴方向与β 成比例的径向力矩(图7a),或增加沿y 轴方向与α 成比例的径向力矩(图7b)。
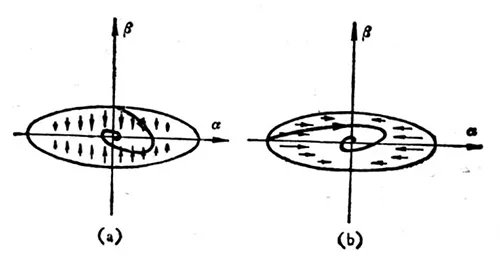
图7 陀螺罗经的阻尼
实现第一种阻尼方案的方法很多,最简单的方法是将下摆的配重与内环组合体的连接点向东偏移一微小角度ε。极轴相对水平面倾斜β 角时,重力对O 点除产生绕y 轴的力矩My 以外,还附带产生绕x 轴的微小力矩Mx 起阻尼作用(图8)。
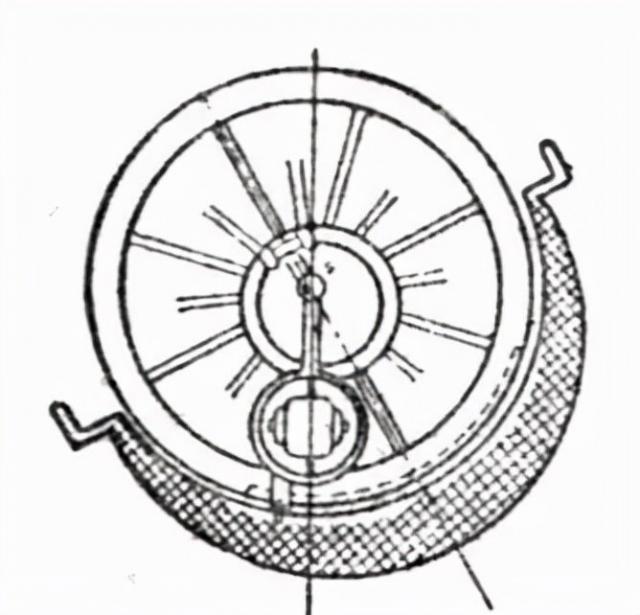
图8 配重与内环的偏心连接
实现第二种方案的困难在于方位角α 的信息无法预先获得,因为α 的量测基准正是有待罗经建立的子午面。利用α 与β 的相位差为90°的特点,可将此阻尼力矩由与β 成正比但相位与β 相差90°的水平力矩代替。液体摆即具有此特殊功能,它由两只盛有粘性液体形状相同的容器组成,容器间以细管相连通。当连通器的载体倾斜时,液体从高端容器流入低端容器,产生重力矩体现复摆效应。设液面相对容器轴 y 的倾角为θ,载体的y 轴相对水平轴Y 倾斜β 角,则液面相对Y 轴的倾角为θ-β (图9)。液体在连通管内的流速与两端压力差成正比,即与θ-β 成正比,dθ/dt=-c(θ-β)。将比例系数c 的倒数记作T=1/c,写作T(dθ/dt)+θ=β 。对于强粘性液体,时间常数T 足够大。则含流速的第一项近似与β 成正比,表明与倾覆力矩成比例的θ 与基体的摇摆运动之间有接近90°的相位差。
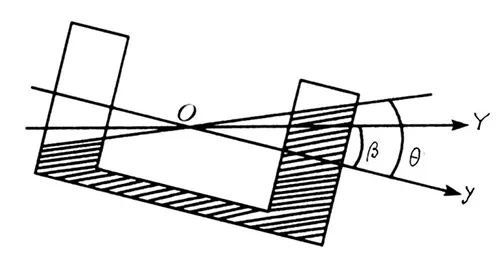
图9 液体摆
04
实践中出现的新问题
解决了陀螺罗经的指北原理以后,又有实践中提出的新理论问题出现。首先是罗经实际使用时,船舶南北向的航行速度会改变理论分析中地理坐标系的指向,使陀螺极轴趋近的子午线偏离真正的子午线。所导致的子午线偏离称为速度误差(图10)。
其中,R 为地球半径,vE 和vN 为船舶的东向和北向航速。速度误差随纬度ϕ 的增高而变大,但可在航行中予以修正。仅当纬度接近地球两极时误差无限增大,而不能用于高纬度地区。
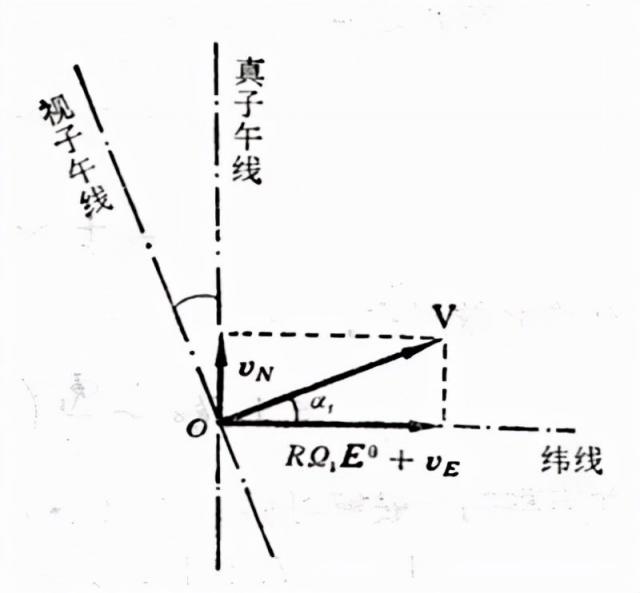
图10 速度误差的产生
此外,船舶加速、减速或转弯在重力摆上出现的惯性力会引起冲击误差。这个难题被德国物理学家舒勒 (Schuler, M.) 彻底解决。1923年,他从理论上证明,如果将单摆的摆长增加到与地球半径R 相等,则无论载体的加速度有多大,单摆可始终与地垂线方向保持一致而免除加速度的干扰。将地球半径R=6371km,重力加速度g=9.81m/s² 代入周期公式T=2π(R/g)1/2,算出此周期为84.4min。这个能避免加速度干扰的特殊周期,称为舒勒周期 (Schuler’s period)。可以证明,将陀螺的周期设计成舒勒周期,就能避免冲击误差出现。
最严重的问题来自船体在波浪激励下永不停息的摇摆。绕艏艉线横摇的摆幅可高达十余度。罗经的初期实践已显示出摇摆引起的巨大误差,为此应先从理论着手探讨误差的产生原因以改进罗经的结构。设船舶航行的方位角为ψ,令地理坐标系 (O-XEN) 绕垂直轴X 顺时针转动ψ 角后组成新的参考坐标系 (O-XYZ)。N 轴到达的新位置Z 轴沿船体的艏艉线。船体绕浮心O0 绕Z 轴作角频率为ω,幅值为Φ 的横摇。设陀螺的支承点O 与O0 的垂直距离为h,则O 点处产生沿横轴Y 的加速a=aY0,a=Φhω²sinωt(图11)。
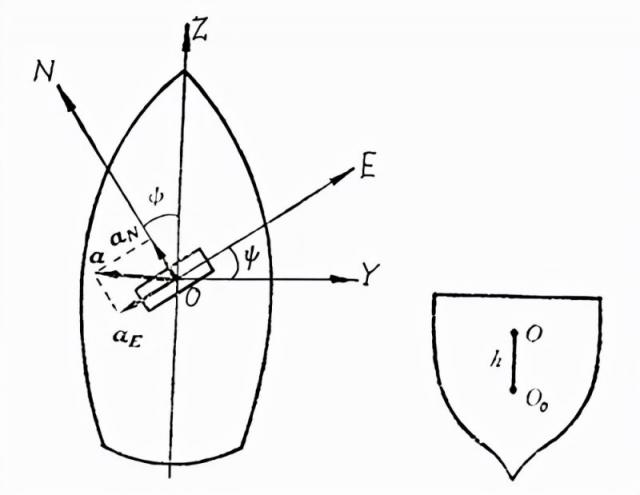
图11 船体绕Z轴的摇摆
为避免罗经随船舶一同摇摆,设计者在内环与外环之间增加一个绕z 轴转动的中环与摇摆的船体隔离。令载有内环和转子的中环组合体的重心下移形成复摆,使其在船体摇摆时仍能保持垂直。设罗经处于理想状态,陀螺坐标系 (O-xyz) 与地理坐标系 (O-XEN) 完全符合。若组合体的质量为m,下移的质心O1 至陀螺支点O 沿摆轴 x1 的矢径为l,相对垂直轴的摆动角为γ(图12)。因摇摆产生的惯性力-ma 相对支点O 产生力矩M=l×(-ma),其沿z 轴的分量Mz使组合体的摆角γ 作受迫振动。与此同时,M 沿x 轴和y 轴的分量Mx 和My 通过轴承传递至转子。从图13可看出,在摇摆过程中,水平分量My 因方向相反而抵消,但离心力分量Mx 方向始终相同。由于船体摇摆的频率远高于陀螺的固有频率,惯性力矩Mx 和My 对陀螺的作用可用每个周期内的平均值代替。My 的平均值为零,而Mx 的平均值使转子绕轴偏离α 角,与地球自转产生的陀螺力矩LΩ1α 平衡。所偏离的角度αs 即船舶摇摆导致的指示误差:

此摇摆误差不仅取决于罗经的结构参数、安装位置和摇摆强度,而且与纬度角ϕ 和方位角ψ 有关。在ψ=0°,90°,180°,270°等特殊位置摇摆误差为零;ψ=45°,135°,225°,315°时摇摆误差有最大值。纬度愈高摇摆误差愈严重,接近地球两极时摇摆误差无限增大。
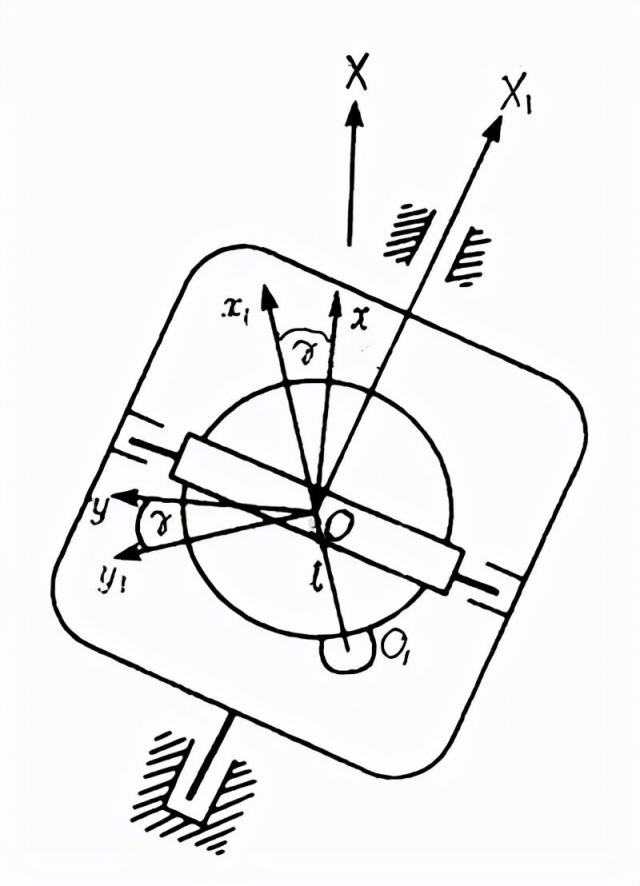
图12 中环组合体的受迫振动

图13 摇摆产生的惯性力矩
05
陀螺罗经的技术实现
当陀螺罗经的力学原理已被充分论证以后,接下来就要靠工程师的智慧和企业家的勇气将理论变为现实了。傅科陀螺仪的失败教训中,1865年特鲁维 (Truvé, G.) 利用电动机驱动解决了提高陀螺转速问题。1904年弗珀 (Föppl, A.) 在德国就利用钢丝悬挂的电动双转子陀螺成功证明了地球自转,实现了傅科未完成的愿望。于是消除支承摩擦,罗经阻尼以及消除摇摆误差等问题,就成为工程师们亟待解决的技术关键。
19世纪末开始的早期工作中,特鲁维已利用内外环组成的万向支架代替钢丝悬挂支承。1884年开尔文 (Lord Kelvin) 建议将带转子的组合体悬浮在液体中的支承方案。经过对各种技术方案的不懈探索,到20世纪初才有了实质性进展。1908年德国的安休茨博士 (Anschütz-Kämpfe,H.) 制造出悬浮在水银容器内的单转子陀螺罗经(图14)。1909年美国的斯佩里 (Sperry,E.A.) 采用与傅科陀螺仪类似的钢丝悬挂支承,但增加了控制系统随时消除钢丝的扭矩。此后,形成了沿不同技术路线发展的两种类型陀螺罗经。
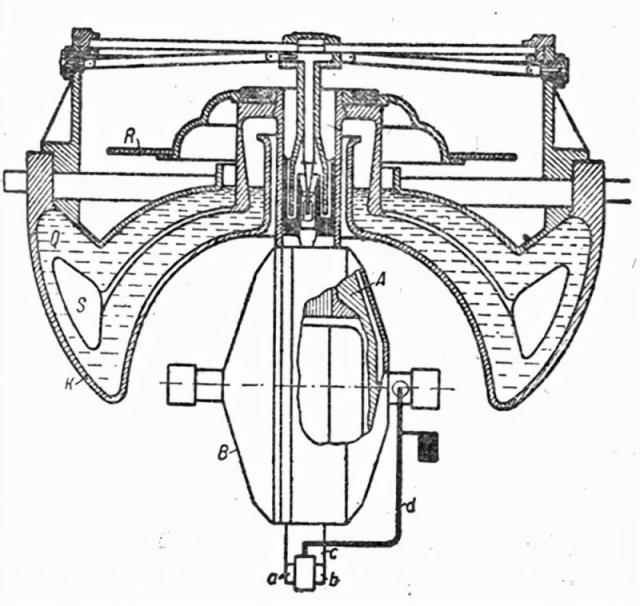
图14 安休茨单转子陀螺罗经
1912年安休茨对罗经做了重大改进,他将框架和转子装进一个空心钢球,钢球悬浮在水银容器里,其重心低于浮心。为消除摇摆误差,钢球内除了沿z 轴的主转子 H1 以外,再增加对称侧放的两个副转子H2 和H3,利用杠杆连接以保证二者与z 轴有相同的倾角。副转子沿z 轴的动量矩分量与主转子的动量矩叠加起导向作用。沿y 轴的分量因方向相反而抵消为零(图15),当摇摆引起沿y 轴的惯性力对钢球质心产生力矩M 时,会迫使副转子H2 和H3 朝z 轴的同方向进动,所产生的陀螺力矩与干扰力矩抵消,以避免钢球绕z 轴摆动,从而消除摇摆的影响。
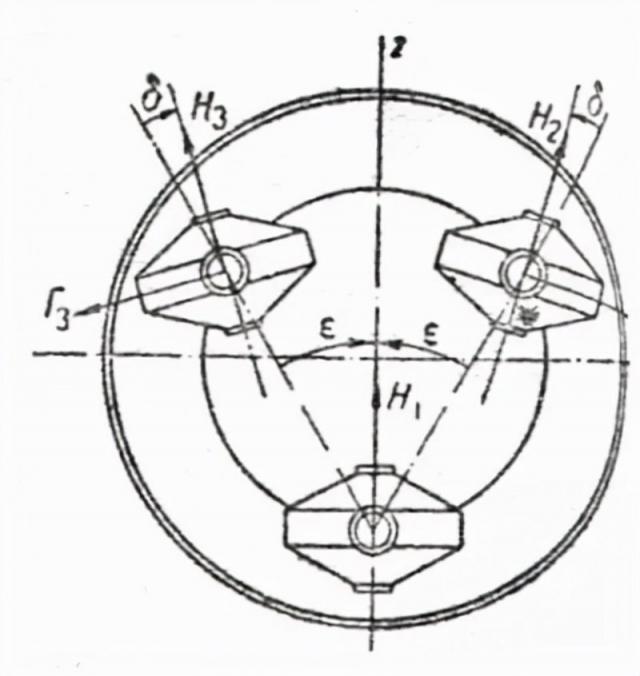
图15 安休茨三转子陀螺罗经
安休茨三转子罗经产品实际用于航海15年,享有很高声誉。1927年再次修改,将陀螺仪的主转子H1 略去,由倾斜45°的副转子H2 和H3 完全替代。陀螺仪和所有附件全部装入密封的铜球浮在液体容器内(图16)。值得一提的是,物理学大师爱因斯坦 (Einstein, A.) 曾作为专利鉴定专家参与安休茨罗经的修改设计工作(图17)。改进后的安休茨双转子罗经作为成熟的技术方案被前苏联仿制,形成Kurs 型号陀螺罗经。也曾引入我国,成为早期的国产罗经产品。
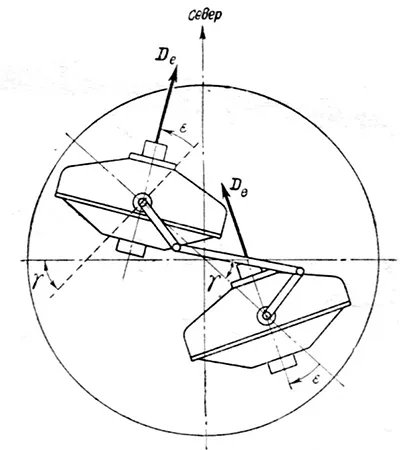
图16 安休茨双转子陀螺罗经
图17罗经实验船上的安休茨(左)与爱因斯坦(右)
沿另一方向发展的斯佩里罗经采用带控制的钢丝悬挂支承,单转子加液体摆以产生阻尼和消除摇摆误差。随着科学技术的进步,以斯佩里罗经为基础,发展为现代化的电控罗经(图18)。利用与液体摆有相同性质的强阻尼摆作为基本敏感元件,测出的内环偏角β 数据通过控制系统输入电动的力矩器,以产生指北过程所需要的力矩。于是纯粹依靠力学规律创造的传统罗经被电子控制系统完全替代。
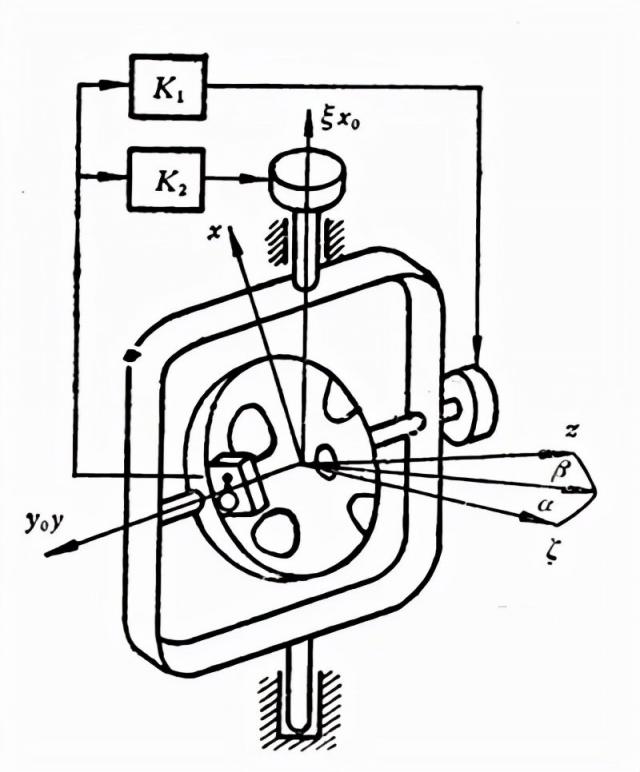
图18 电控陀螺罗经
电控罗经的出现使陀螺罗经的百年发展历史告一段落。陀螺罗经的发明是力学与工程结合的一个成功范例。回顾这段历史的意义在于了解人类对自然规律从认识到利用的奋斗历程,依靠力学家、工程师和企业家的不懈努力,终于使航海家的梦想成真。这对解决当前技术发展的各种新问题不无参考意义。
参考文献:
关注公众号:lmcjl_com(长按复制)
本文来自作者:小落落,不代表懒猪博客立场!
转载请注明:https://my.lmcjl.com/44450.html
本文链接:https://my.lmcjl.com/post/14559.html
4 评论